MOTORES PARA ROBÔS
prof. Ilton L Barbacena
Apresentação dos tipos de motores
Como identificar os motores muito comuns na robótica
- Motores DC possuem 2 fios e sem controle da parada. Geralmente utiliza-se encoders para o controle da parada. Para mudar o sentido de rotação, utiliza-se ponte H, para inverter a tensão alimentação.
- Motores SERVO são motores DC com 3 fios, que já possuem o controle da parada. Mudando a duração do pulso de PWM, muda-se o sentido de rotação e o angulo de parada.
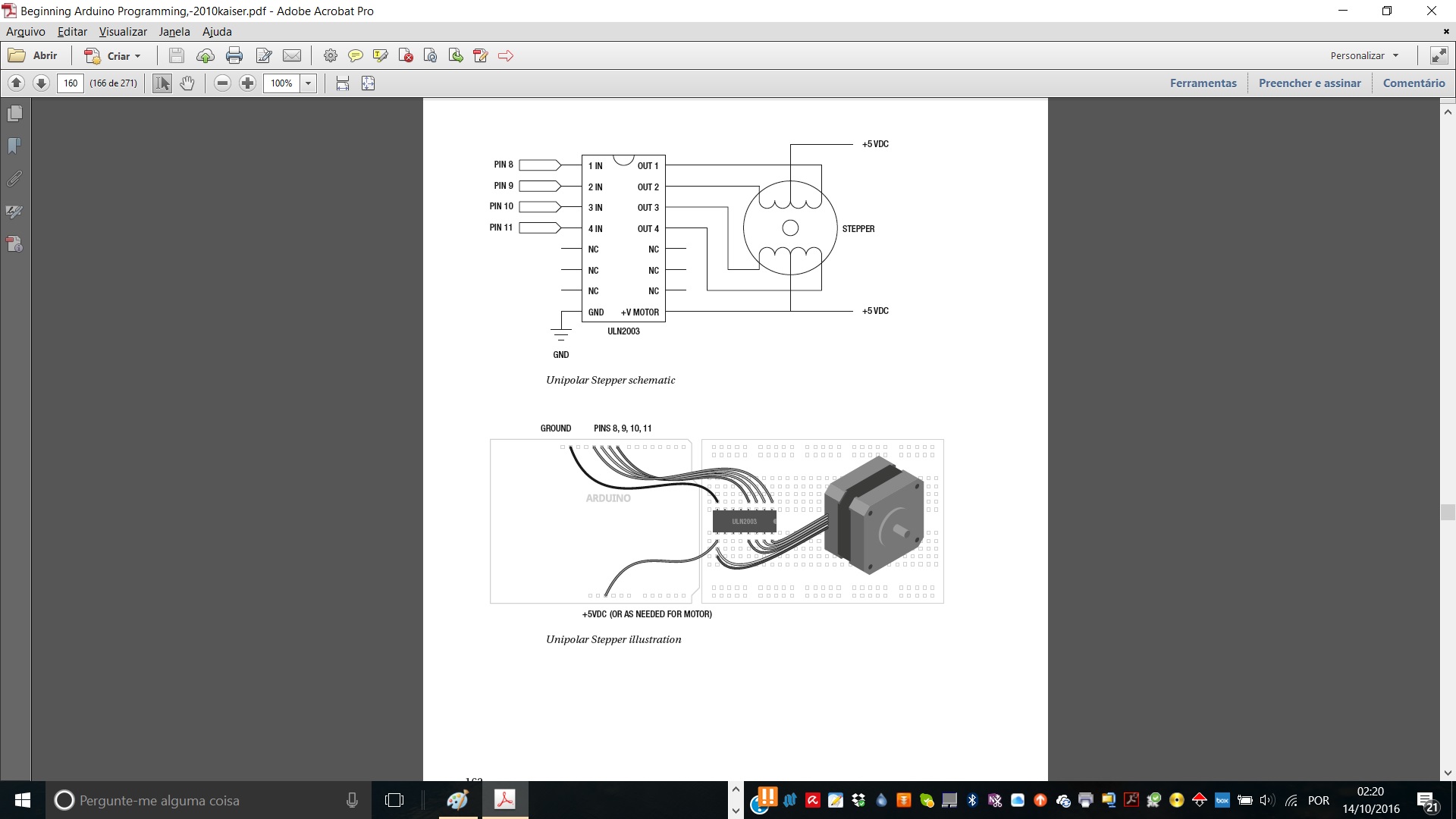
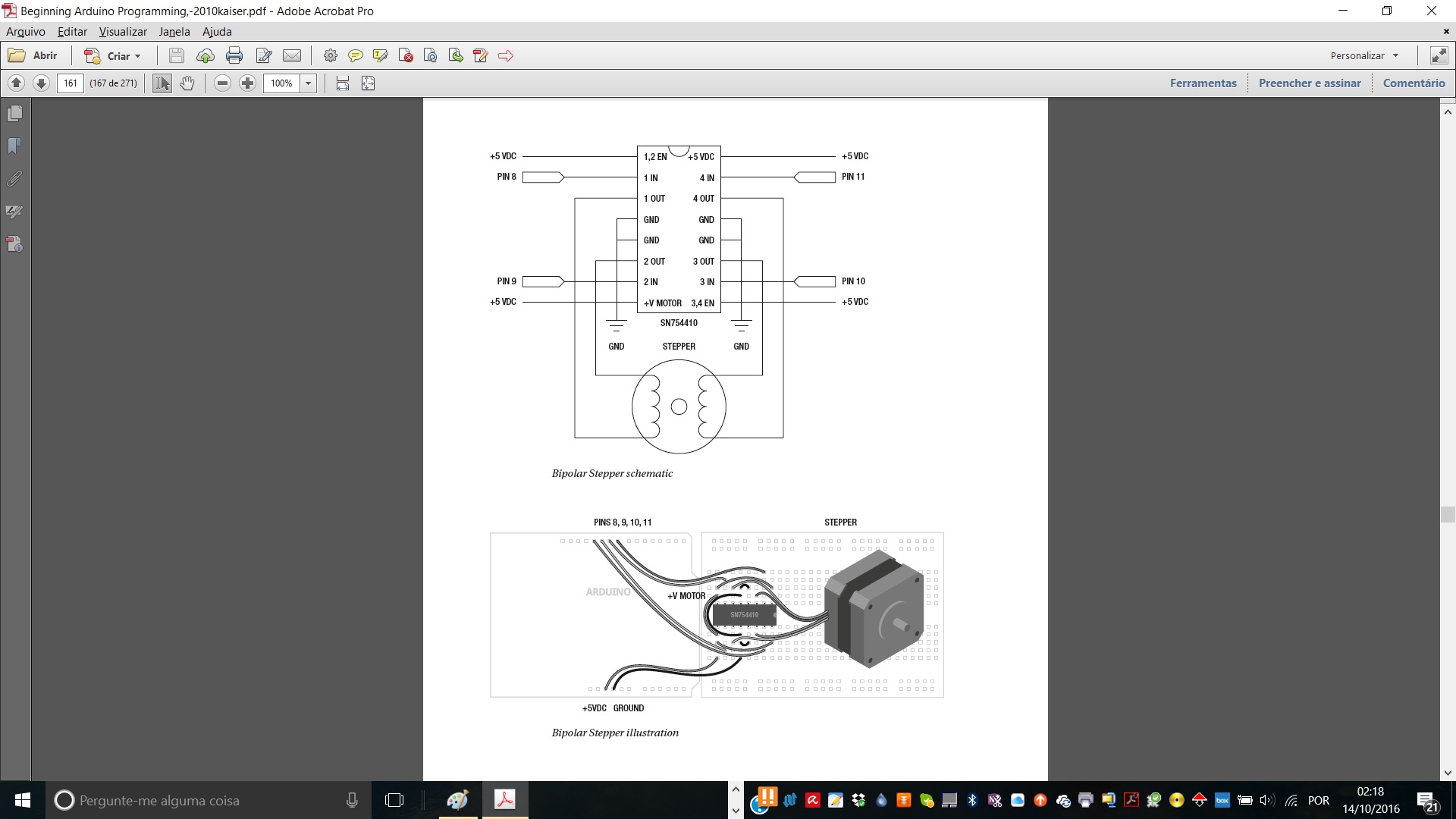
- Motores de Passo são os motores que possuem mais de 3 fios. Mudando-se a sequencia de passo, muda o sentido de rotação. Para controlar a parada basta contar os passos. Os motores de passos podem ser unipolares e bipolares. Os motores unipolares, possuem normalmente 5 ou 6 terminais, onde cada enrolamento possui um ponto central, que pode ser comum ou separado, ligados a tensão de alimentação do motor. Os motores bipolares possuem 4 terminais, 2 para cada enrolamento.
Motores DC
- Animações e videos: 1 / 2 / 3 / 4 / 5 / 6 / 7
Micro bombas caseiras
- Animações e videos: 1 / 2 / 3 / 4 / 5 / 6 / 7
Motores Servo
- Animações e videos: 1 / 2 / 3 / 4 / 5 / 6 / 7 / 8
Motores de Passo
- Animações e videos: 1 / 2 / 3 / 4 / 5 / 6 / 7 / 8 / 9 / 10 / 11 / 12 / 13
- Como identificar os terminais e a sequencia de acionamento: 1 / 2 / 3 / 4 / 5
Ponte H
- Utilizado para inverter o sentido de rotação de motor DC
- Vídeos: 1 / 2 / 3 / 4 / 5 / 6 / 7
PWM
- Utilizado para controlar a velocidade do motor DC e o angulo de deslocamento do SERVO
- Videos: 1 / 2 / 3 / 4 / 5 / 6 / 7 / 8 / 9 / 10 / 11 / 12
Transistores para acionamento de motores
Sugestão de atividade:
- Utilizando uma placa de controle (arduino + ESP-01 ou ESP-12), elaborar um programa e realizar a montagem prática, utilizando uma ponte H e um motor DC, para controlar o sentido e a velocidade do motor. O controle deve ser feito utilizando, via wi-fi, um aplicativo no celular ou uma página html com este elemento (slider) da seguinte forma:
- Quando o slider estiver na posição central (50% de seu percurso), o motor deve ficar parado
- Se deslocar a posição do slider em sentido crescente, a partir de 50%, vai aumentando a velocidade do eixo do motor, até atingir a velocidade nominal, quando atingir 100% do percurso do slider;
- Se deslocar a posição do slider em sentido decrescente, a partir de 50%, o eixo do motor deve girar em sentido contrário ao movimento anterior, e ir aumentando sua velocidade até atingir sua velocidade máxima, no sentido contrário, na posição inicial do slider (0% do percurso);
- Fixar uma fita crepe no eixo do motor, para se perceber o movimento de seu eixo.
{kind=link}
{kind=link}